






We are delighted to celebrate a significant milestone in the academic journey of Benjamin Ghansah, who has officially advanced to candidacy in the Geospatial Computer Science program. This achievement marks the successful completion of rigorous coursework, comprehensive examinations, and the approval of his dissertation proposal, a testament to his dedication, intellectual rigor, and perseverance. We look forward to the next phase of his doctoral journey.
MANTIS Hosts Visiting Scholar Hannah Spero for Research Showcase
The MANTIS Lab recently hosted Hannah Spero, a doctoral candidate from University of Notre Dame, who presented her research on tracking large coastal boulders in Ireland. As she nears the completion of her PhD, Hannah demonstrated how extreme wave events can transport massive rocks and provided insights into past marine conditions and coastal hazards. Her presentation featured geospatial visualizations and displacement analyses that illustrated how boulders serve as indicators of high-energy events. A key aspect of her work has been her collaboration with MANTIS personnel, which integrates advanced remote sensing and surveying methods into coastal studies.
The session sparked discussion on methodology and applications and emphasized the importance of interdisciplinary approaches in environmental research. The lab extends its appreciation to Hannah for an engaging and informative presentation.

MANTIS-Supported Study Featured in AGU's EOS
A recent feature in American Geophysical Union’s Eos magazine highlights collaborative research on coastal geomorphology and extreme wave processes. The article presents fieldwork spearheaded by the University of Notre Dame, with contributions from MANTIS-affiliated researchers. The work centers on coastal boulder deposits of Inishmaan Island, Ireland. MANTIS personnel, including Michael J. Starek and Jake Berryhill, supported the study through advanced geospatial measurement techniques. UAS surveys and high-precision RTK GNSS mapping supported detailed characterization of boulder distributions and coastal morphology.

MANTIS Faculty and Students Attend ASPRS Gulf South Conference
Faculty and students from the MANTIS Laboratory recently attended the 2026 ASPRS Gulf South Region Geospatial Conference in Thibodaux, Louisiana, engaging with the regional geospatial community and sharing ongoing research efforts. The conference provided a valuable platform for collaboration, knowledge exchange, and discussion of emerging trends in photogrammetry, remote sensing, and geospatial analytics. MANTIS participants contributed to technical sessions and connected with professionals from academia and industry. Participation in the conference highlights the lab’s continued commitment to advancing geospatial science and fostering professional development through active engagement in the broader research community.

Dr. Michael Starek Participates in ASPRS Panel Discussion
MANTIS Director Dr. Michael J. Starek served as a panelist at the 2026 ASPRS Gulf South Region Geospatial Conference. The panel, moderated by Kent Groh of The Geoholics, focused on geospatial science and geomatics engineering, including the current state of the field and future directions. Alongside Starek, panelists included Dr. Nicholas Enwright and Rob Crawshaw (representing both academia and industry). The discussion provided valuable and unique perspectives on emerging trends, the evolving role of geospatial technologies, and the growing influence of artificial intelligence and related innovations.



MANTIS Students Earn Top Honors at ASPRS Conference
MANTIS students José Pilartes-Congo and O. Esther Oladoyin received first and second place awards, respectively, at the 2026 ASPRS Gulf South Region Geospatial Conference in Thibodaux, Louisiana. José was awarded first place for his presentation, “Distinguishing True Surface Change from Measurement Error in Repeat UAS Surveys,” and Esther earned second place for her presentation, “From Visualization to Surveying: 3D Scene Representations with Novel View Synthesis.” The lab congratulates both students on their accomplishments.


MANTIS Students Present Research at ASPRS Gulf South Region Geospatial Conference
MANTIS students showcased a diverse range of research at the 2026 ASPRS Gulf South Region Geospatial Conference in Thibodaux, Louisiana, highlighting ongoing work in remote sensing, photogrammetry, and geospatial analytics. In this year’s edition, one MANTIS master’s student (Vamshi Gindam) and three PhD MANTIS students (José Pilartes-Congo, O. Esther Oladoyin, and Mohammad Sohail) participated.
Vamshi presented his work titled “Seasonal Beach Morphology and Shoreline Change Detection Using Mobile LiDAR at Padre Island National Seashore,” focusing on coastal monitoring and geomorphological change.
Mohammad presented “A Multi-Index Sentinel-2A and Machine-Learning Approach for High-Resolution Flood Mapping: Insights from Kerr County’s 2025 Floods,” demonstrating how satellite data and machine learning can support flood mapping and disaster response.
José presented his work titled “Distinguishing True Surface Change from Measurement Error in Repeat UAS Surveys,” exploring the challenge of separating real surface change from measurement noise in repeat UAS surveys. He also presented on behalf of Benjamin Ghansah, “Estimating Canopy Height of Crops Using SkySat Stereopair Images and Stereophotogrammetry.”
Finally, Esther presented her work titled “From Visualization to Surveying: 3D Scene Representations with Novel View Synthesis,” exploring emerging approaches such as Gaussian Splatting for 3D reconstruction and scene understanding.
These presentations highlight the breadth of research within the MANTIS Lab, the application of diverse remote sensing techniques to real-world problems, and the lab’s continued commitment to advancing geospatial science.

Pilartes-Congo Awarded ASPRS William A. Fischer Memorial Scholarship
MANTIS Ph.D. candidate José Pilartes-Congo has been awarded the prestigious ASPRS William A. Fischer Memorial Scholarship at ASPRS Geo Week (Denver, Colorado). This nationally competitive award recognizes graduate students whose work advances innovative applications of remote sensing data and technologies. The MANTIS Lab congratulates José on this achievement and looks forward to his continued contributions to geospatial science.

MANTIS Students Present Research at Geo Week 2026
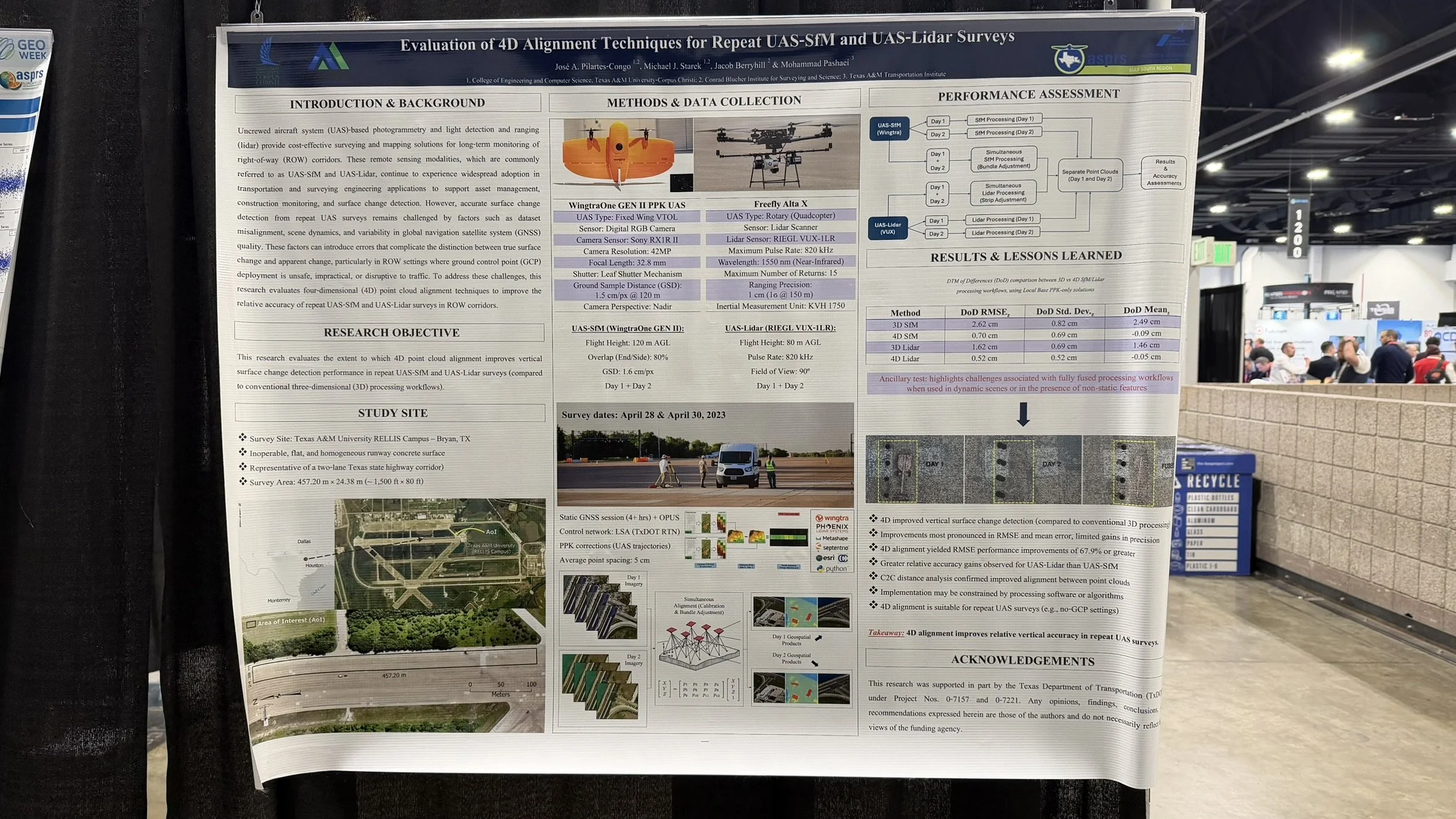
MANTIS Lab PhD students Benjamin Ghansah and José Pilartes-Congo recently presented their research at Geo Week in Denver, Colorado. Ghansah delivered an oral presentation titled “Generating High-Resolution Crop Canopy Height Information Using SkySat Stereopairs,” highlighting advancements in satellite-based agricultural monitoring. Pilartes-Congo presented both an oral and poster titled “Evaluation of 4D Alignment Techniques for Repeat UAS-SfM and UAS-Lidar Surveys,” focusing on improving multi-temporal geospatial data integration. Geo Week brings together geospatial professionals and researchers to advance innovative solutions to real-world challenges, providing a valuable platform for academic and industry collaboration.



Recent Publications Highlight MANTIS Research Excellence Across Agriculture, Coastal Science, and Remote Sensing
The MANTIS team continues to demonstrate strong scholarly productivity, with recent publications by affiliated students, faculty, and staff appearing in peer-reviewed journals and international conferences. These works reflect the lab’s interdisciplinary strengths in UAS-SfM, Lidar, and GeoAI, with applications spanning agriculture, coastal processes, and environmental monitoring.
Recent MANTIS-affiliated publications include:
High Throughput Phenotyping of Energy Cane using Uncrewed Aircraft System (UAS) and Machine Learning, published in Industrial Crops and Products by Ghansah et al.
Storm-Driven Coastal Boulder Transport over Two Winter Storm Seasons on Inishmaan, Ireland, published in Geomorphology by Spero et al.
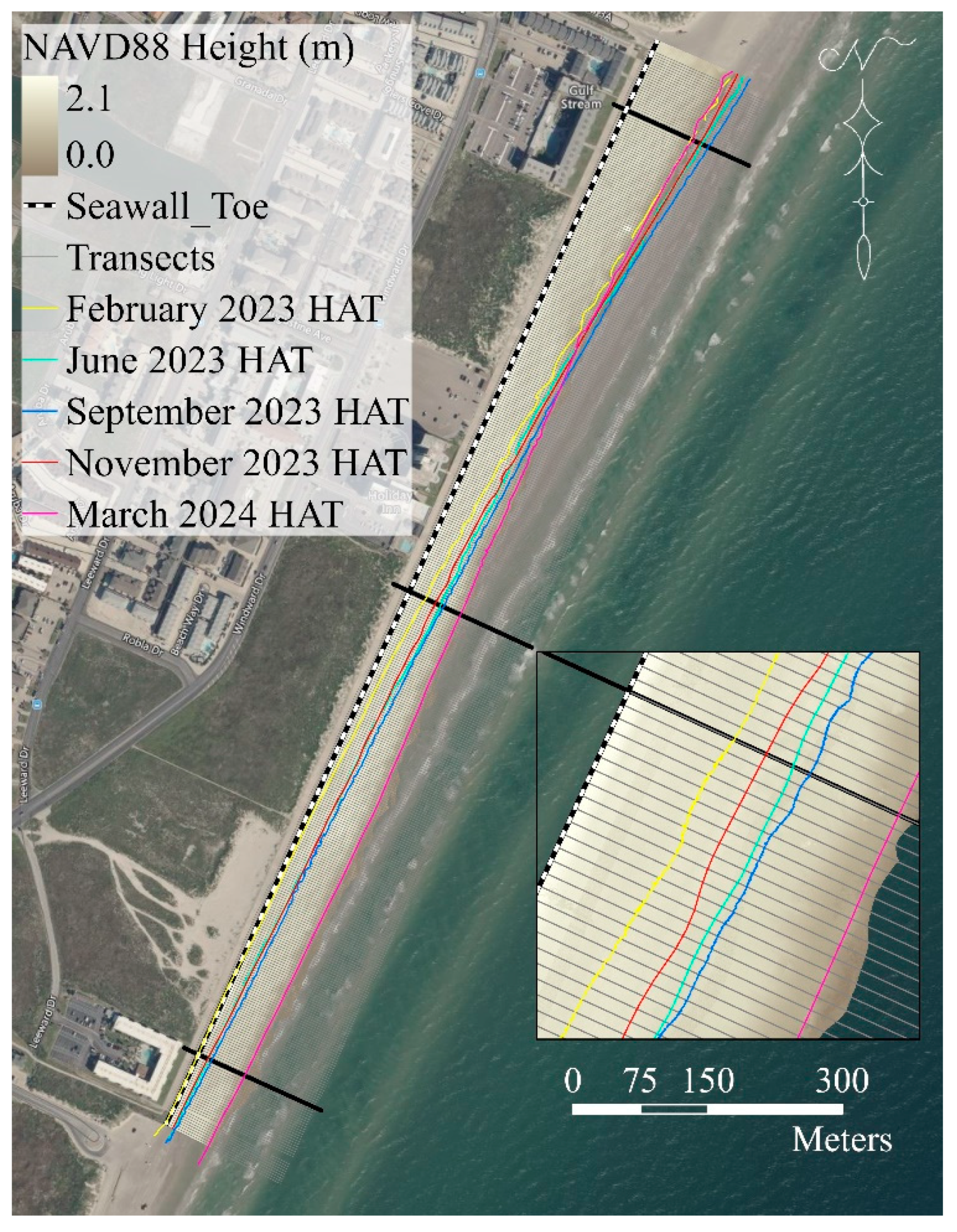
Application of MLS and UAS-SfM for Beach Management at the North Padre Island Seawall, published in Remote Sensing by Garcia-Williams et al.
UAS Surveying of Wetlands: Comparing SfM and Lidar for 3D Reconstruction and DTM Generation, published in the 2025 IEEE International Geoscience and Remote Sensing Symposium by Pilartes-Congo et al.
Evaluation of SfM-MVS Apple Lidar Data for Coastal Monitoring, published in the 2025 IEEE International Geoscience and Remote Sensing Symposium by Pandey et al.
Utilizing UAS-Lidar for High Throughput Phenotyping of Energy Cane, published in the 2025 IEEE International Geoscience and Remote Sensing Symposium by Ghansah et al.
Please visit the Publications tab for direct access to these articles and conference papers.

MANTIS Director Presents at 2025 TxDOT Geospatial Conference
MANTIS Director Dr. Michael J. Starek delivered a technical presentation at the 2025 Texas Department of Transportation (TxDOT) Geospatial Conference, held in San Marcos, Texas. His talk, titled “Control and Alignment of Reality Capture Surveys: From the Ground Up,” highlighted emerging methodologies that strengthen the accuracy, reliability, and long-term utility of 3D mapping products used throughout transportation workflows.
As TxDOT continues its Digital Delivery initiative, the need for robust, repeatable, and high-fidelity spatial data has become increasingly vital. Dr. Starek addressed this priority by examining best practices for controlling and aligning dense 3D point clouds, which are data products foundational to contemporary digital survey pipelines. His discussion emphasized that reality capture datasets generated from UAS photogrammetry, mobile and terrestrial LiDAR, and SfM techniques play an integral role in engineering design, construction support, and the creation of digital twins of transportation infrastructure.
The presentation provided a comprehensive overview of strategies used to ensure that dense 3D datasets remain consistent and accurately georeferenced across multiple survey epochs. Key topics included: (1) direct and indirect georeferencing approaches, highlighting their implications for positional accuracy and workflow efficiency, (2) point cloud registration techniques, including both target-based and targetless methods for aligning heterogeneous datasets, (3) SLAM-based solutions that improve real-time mapping and navigation capabilities, particularly in constrained or GPS-limited environments, (4) multi-epoch data fusion methods, such as 4D SfM, enabling detailed temporal analysis and reliable change detection, and (5) error propagation considerations, emphasizing how uncertainty affects downstream decision-making, especially in detecting, quantifying, and interpreting change.
Dr. Starek also presented field examples drawn from repeat UAS and LiDAR surveys, illustrating practical considerations for deploying these methods in real-world transportation contexts. These examples demonstrated how rigorous control and alignment workflows improve model accuracy, enhance project coordination, and support long-term monitoring of evolving roadway and infrastructure conditions.
By addressing both methodological foundations and field-tested applications, Dr. Starek’s presentation contributed to a broader conversation on how geospatial technologies can streamline transportation project delivery and strengthen data-driven decision support. His work underscores MANTIS’s ongoing commitment to advancing geospatial science, fostering innovation, and supporting agencies like TxDOT in leveraging reality capture technologies for safer, more efficient, and more resilient infrastructure systems.
Benjamin Ghansah Defends Dissertation Proposal
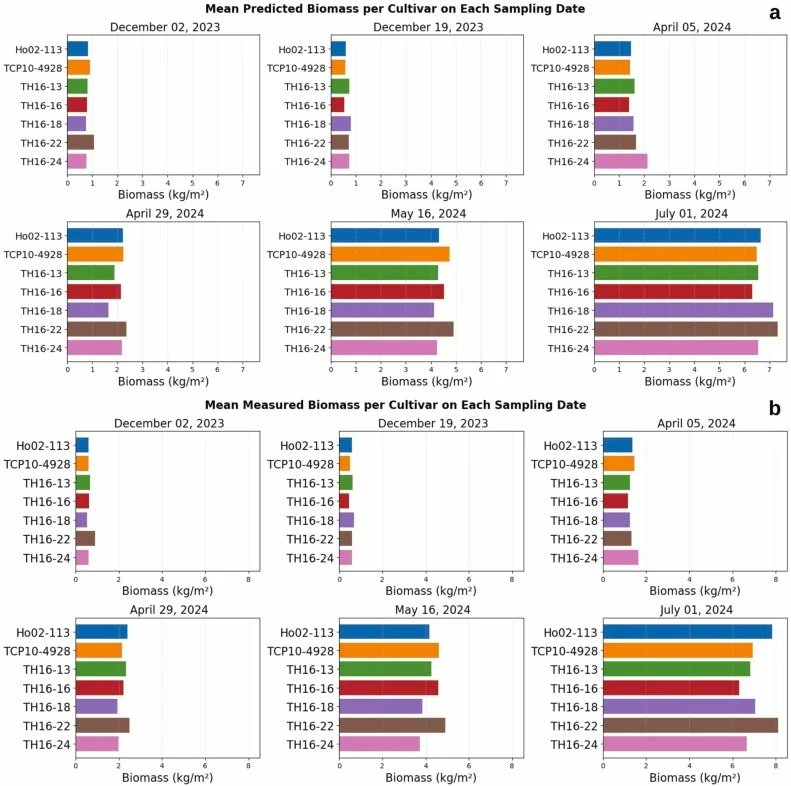
We are proud to announce that Benjamin Ghansah has successfully defended his Ph.D. proposal titled “Multi-Scale Crop Height Estimation with UAS and Satellite-Based Photogrammetry and Lidar.” This marks a pivotal achievement in Benjamin’s doctoral journey and sets the stage for an innovative and impactful body of research in geospatial engineering and precision agriculture. His research tackles one of the central challenges in modern agriculture (accurately and efficiently measuring crop canopy height, a critical variable for assessing biomass, yield, and plant health).
——
His proposal abstract read as follows:
Crop canopy height is an important variable in precision agriculture (PA) due to its direct correlation with biomass, yield, and plant health. Accurate canopy height measurements enable farmers to assess the physiological status of their fields and make informed decisions regarding irrigation, fertilization, and pest management, ultimately optimizing resource use and improving economic returns. However, conventional field-based measurement techniques are labor-intensive, time-consuming, and often infeasible at larger spatial scales. This research addresses these challenges through the development of a tiered, multi-scale remote sensing framework for crop canopy height estimation that integrates two three-dimensional (3D) sensing modalities, lidar and photogrammetry, across three platform types: Uncrewed Aircraft Systems (UAS), SkySat spaceborne imaging, and ICESat-2 spaceborne lidar.
At the field scale, UAS-lidar and UAS-Structure-from-Motion (SfM) photogrammetry using a red-green-blue (RGB) digital camera are used to phenotype energy cane cultivars on an experimental field in Weslaco, Texas. The objective assesses the performance of each sensor modality in estimating height and biomass. At the farm scale, the study develops a stereophotogrammetric workflow optimized for agricultural landscapes using SkySat tri-stereo imagery. A key step in this workflow is the refinement of SkySat's rational polynomial coefficients (RPCs) using high-precision ground control points (GCPs). At the regional scale, the study employs a deep learning model to fuse sparse ICESat-2 canopy height observations with high-resolution SkySat imagery, generating continuous canopy height maps across large agricultural areas. The proposed framework offers scalable solutions for agricultural monitoring, with broad applicability across different crop systems and landscapes. The project also contributes to interdisciplinary capacity in remote sensing, machine learning, and geospatial analytics, advancing skills and knowledge relevant to emerging careers in precision agriculture, environmental monitoring, and climate-smart farming.




MANTIS Researchers Attend Geological Society of America Annual Meeting in San Antonio
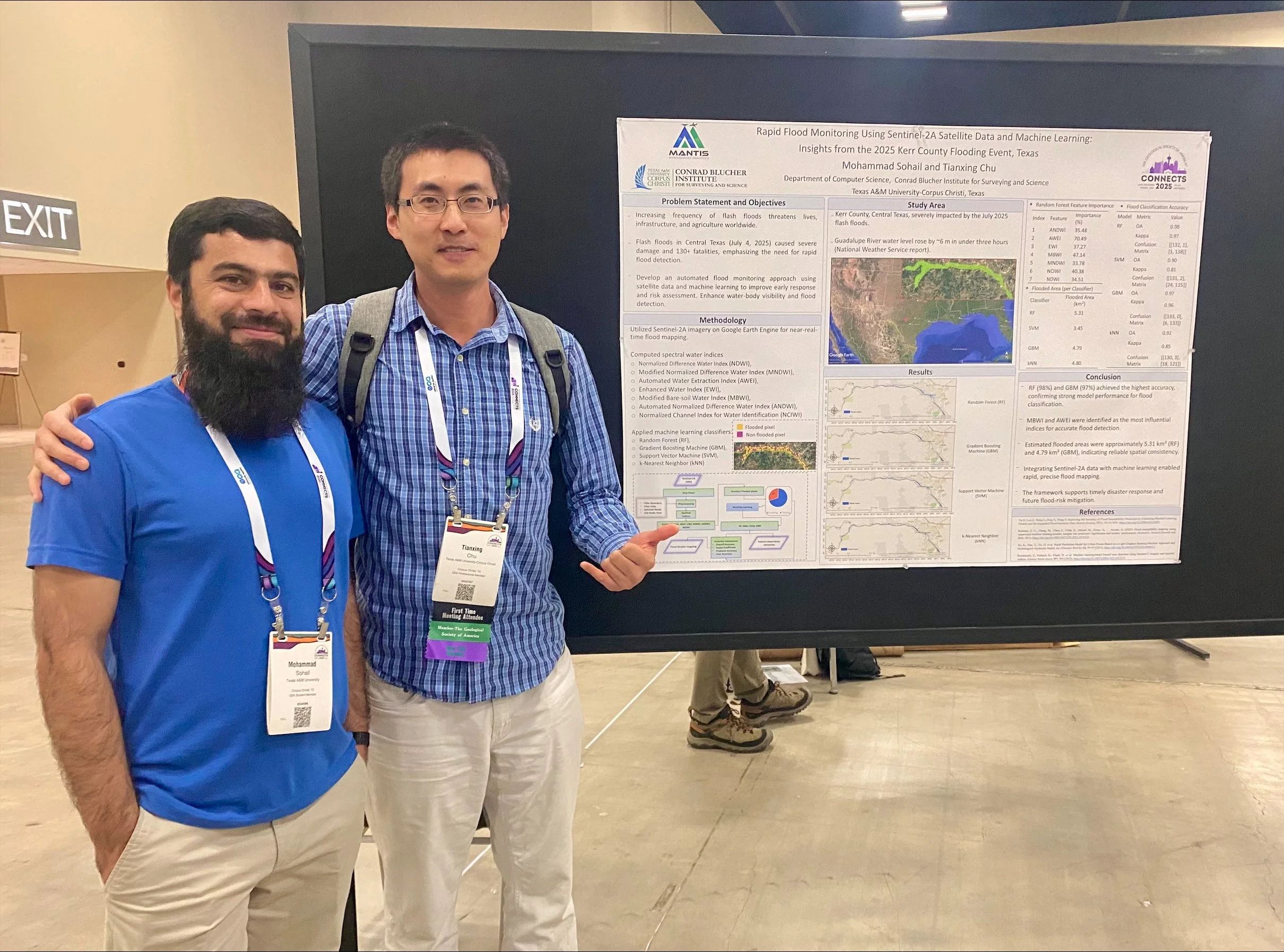
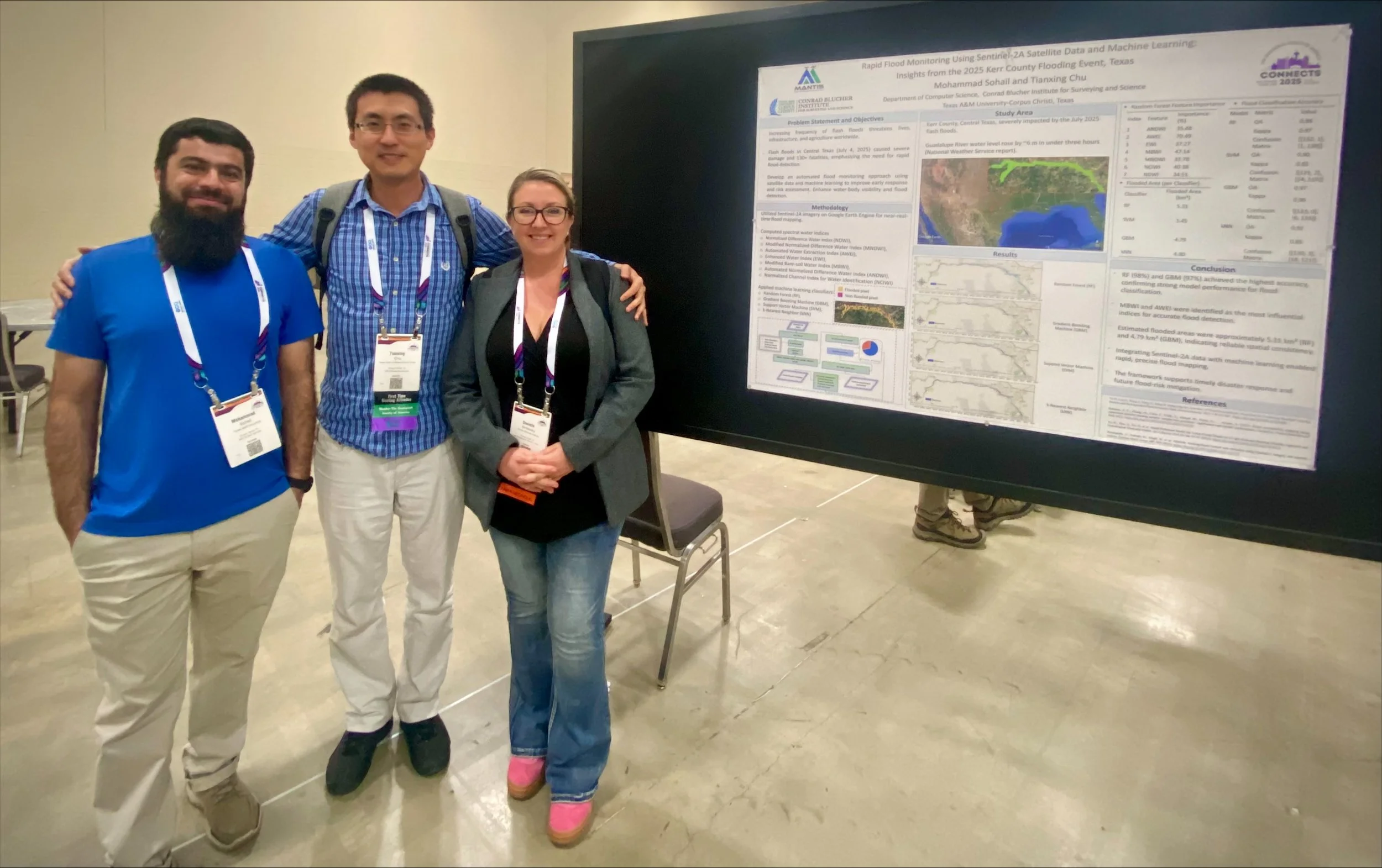
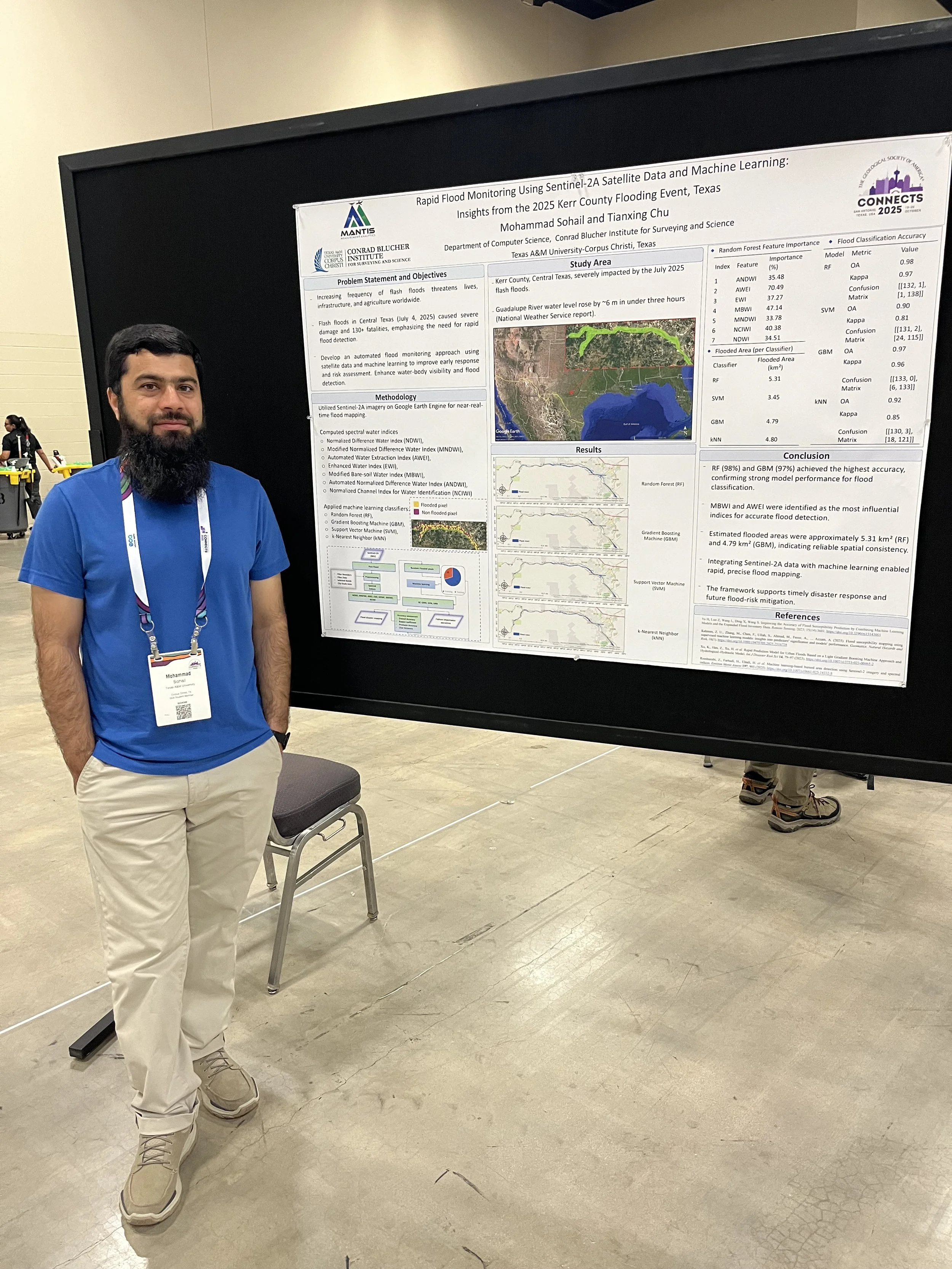
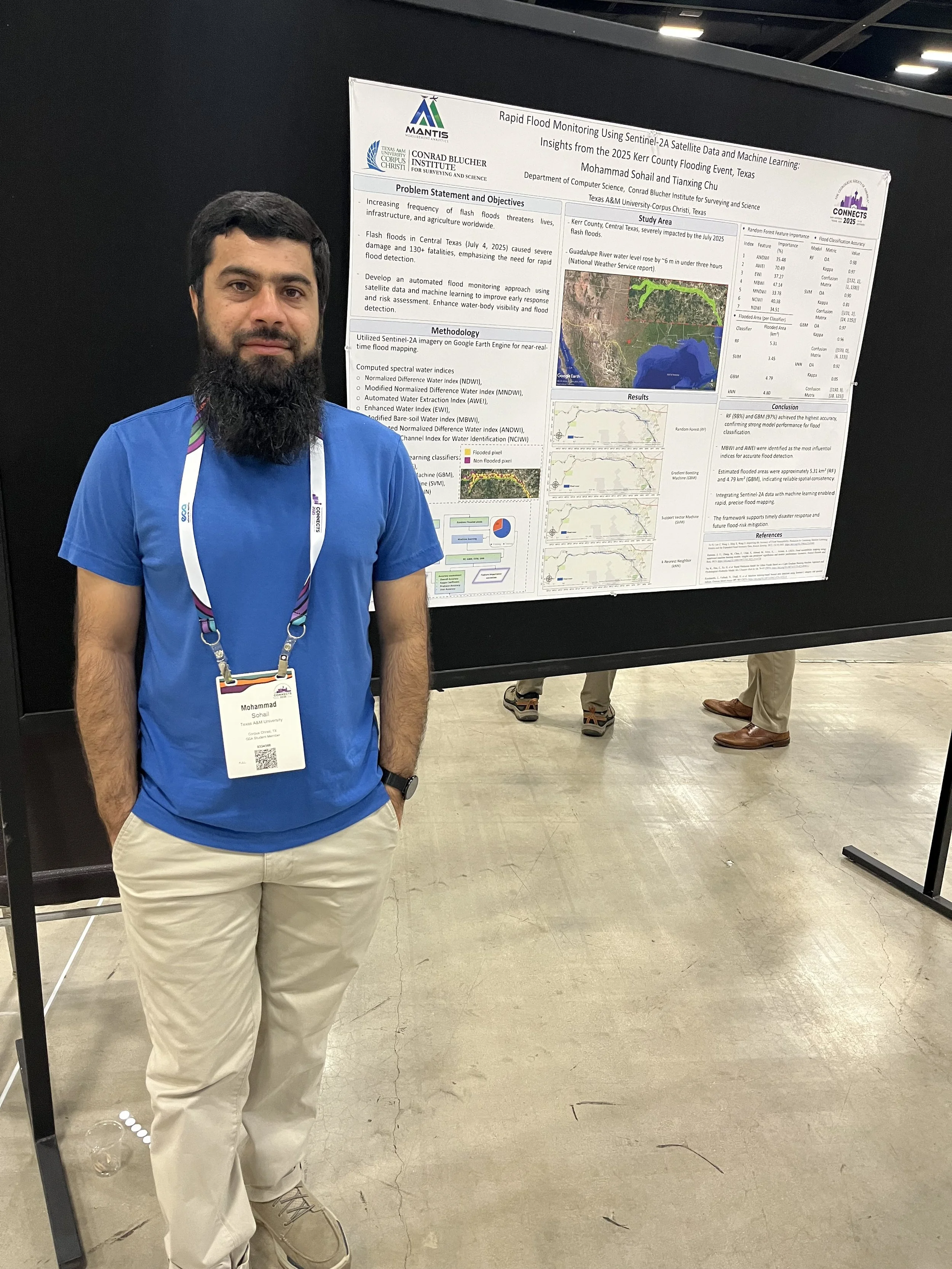
MANTIS Assistant Director Dr. Tianxing Chu and students Mohammad Sohail and Ahmed Omar attended the Geological Society of America (GSA) Annual Meeting held in San Antonio, Texas, from October 19-22, 2025. The event brought together geoscientists and researchers from around the world to share advancements in Earth science and geospatial technologies.
Mohammad Sohail, MANTIS Ph.D. student in Computer Science, presented his research titled “Rapid Flood Monitoring Using Sentinel-2A Satellite Data and Machine Learning: Insights from the 2025 Kerr County Flooding Event, Texas.” His study focused on the devastating flash floods that struck Central Texas, where the Guadalupe River rose by nearly six meters within hours. Mohammad developed an automated flood-mapping framework using Sentinel-2A imagery, spectral water indices, and machine learning algorithms on the Google Earth Engine platform. His approach highlights how satellite-based analytics can support rapid disaster response and flood-risk assessment. In addition, Mohammad volunteered as a Field Guide and Map Attendant, assisting conference participants and contributing to the event’s organization.
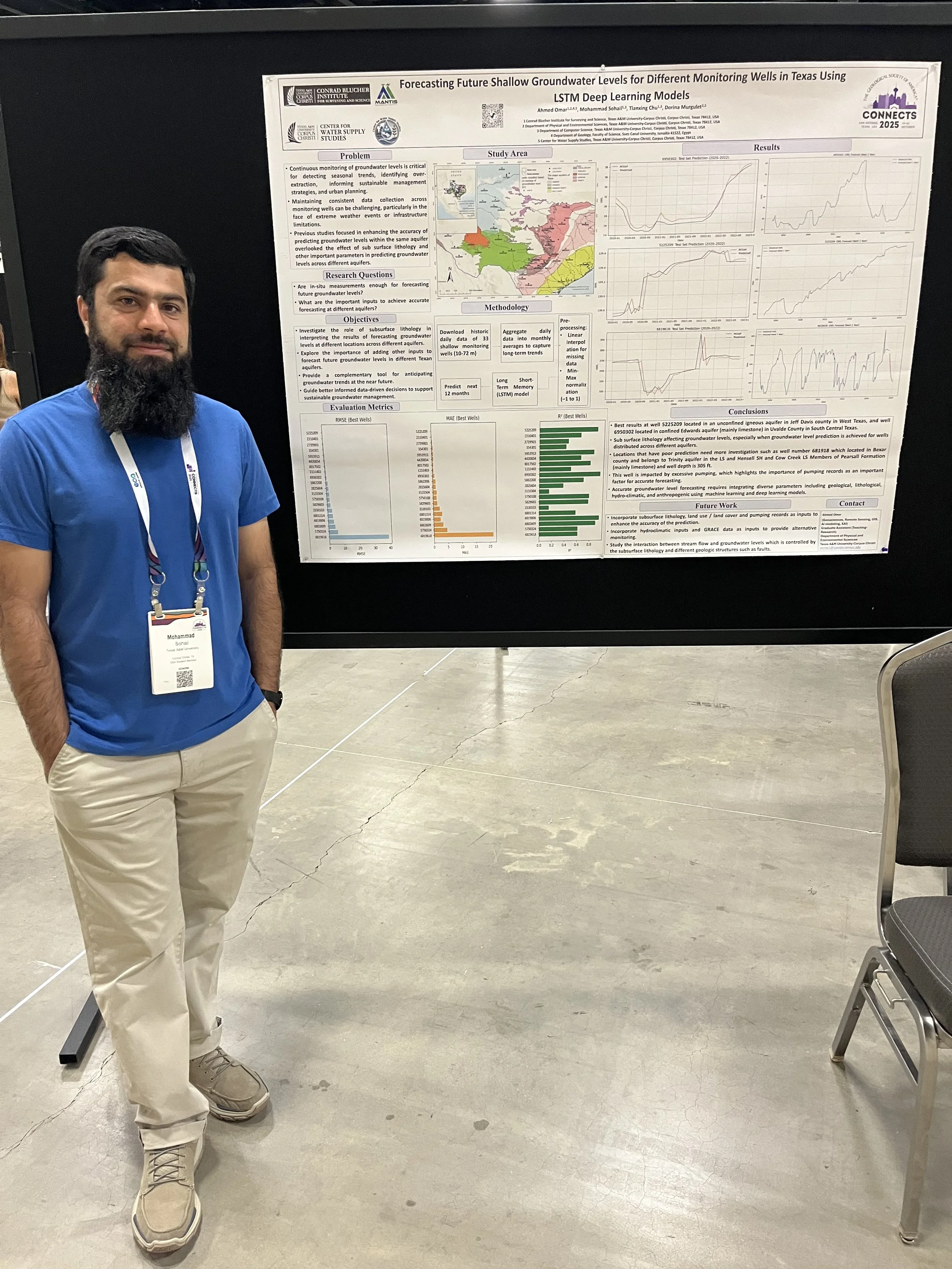
Ahmed Omar, also a MANTIS Ph.D. student in Coastal Marine Systems Science, delivered both a poster and an oral presentation showcasing his work on groundwater modeling and AI. His poster presentation, titled “Forecasting Future Shallow Groundwater Levels for Different Monitoring Wells in Texas Using LSTM Deep Learning Models,” demonstrated the capability of Long Short-Term Memory (LSTM) deep learning models to forecast groundwater levels up to one year in advance using only historical groundwater data. The study highlighted the value of LSTM models as a complementary tool to traditional monitoring networks, particularly in areas with intermittent data availability or limited resources. In addition, his oral presentation, titled “Data-Driven Long-Term Monitoring of Groundwater Levels in Shallow, Intermediate, and Deep Wells Across Different Regions of Texas by Utilizing Remote Sensing Data, GIS, and Various AI Techniques,” introduced a framework that integrates remote sensing, meteorological, geologic, and GIS-derived variables with advanced machine learning and xAI methods. The inclusion of static geologic features and well classification by groundwater elevation enhanced model accuracy and interpretability across well groups. Using Shapley Additive exPlanation (SHAP) values, Ahmed provided insights into the relative importance of predictors at global and local scales, improving model transparency and reliability. This framework advances the methodological frontier of groundwater modeling in data-sparse regions and offers a scalable, transferable solution for sustainable groundwater management under changing climatic and land use conditions.
Dr. Danielle Smilovsky, a CBI member who collaborates closely with Dr. Chu, led a presentation titled “Recharged but not Recovered: InSAR Observations of Persistent Land Subsidence in Arizona’s Willcox Basin.” Her work used satellite interferometry to analyze ongoing land deformation despite groundwater recharge efforts.
Dr. Chu provided supervision and guidance to the students, underscoring MANTIS’s commitment to mentorship, innovation, and collaborative research in geospatial analytics.
The GSA 2025 conference offered valuable exposure, networking opportunities, and professional development for MANTIS members, further strengthening the lab’s contributions to applied geoscience research.










Dr. Mohammad Pashaei Publishes Journal in SALIS
Former MANTIS Ph.D. student and post-doctoral researcher recently published an article in the Journal of Surveying and Land Information Science (SALIS) titled “UAS-SfM Crash Scene Reconstruction in a Controlled Environment: Effects of Image Overlap and Camera Tilt.” The paper explores how key photographic flight parameters, specifically image overlap and camera tilt, affect the quality of 3D reconstructions of crash scenes using UAS-SfM workflows. The work was conducted in a controlled environment to simulate crash-scene conditions while allowing systematic variation of parameters.
——
The abstract reads as follows:
The integration of uncrewed aircraft system (UAS) technology with structure-from-motion / multi-view stereo (SfM/MVS) photogrammetry enables efficient and high-resolution three-dimensional (3D) reconstruction of crash scenes. This process, commonly referred to as UAS-SfM, facilitates the generation of geospatial products such as dense point clouds, textured meshes, digital surface models, and orthophotos that support post-crash activities, including liability assessment and roadway clearance. However, the accuracy and reliability of these products depend on a range of factors, including sensor-based, environmental, and UAS mission parameters. Isolating the impact of individual variables on UAS reconstruction quality is difficult due to their complexity and interdependence. To address this challenge, this study leverages a controlled, simulated crash scene to systematically evaluate how changes in image overlap and camera tilt affect UAS-SfM reconstruction quality. Results suggest that image overlap below 70 percent reduces point cloud density, increases vertical error, and degrades camera calibration accuracy, particularly in the vertical dimension. On the other hand, moderate camera tilt angles (≤20°) improve the reconstruction of complex and vertical surfaces without significantly degrading accuracy. However, excessive tilt (>30°) may introduce increased reprojection error and positional uncertainty. These results offer practical guidance for optimizing UAS-SfM workflows in hazardous crash response environments, improving the reliability of spatial data products for transportation safety and legal investigations.
José Pilartes-Congo Advances to Candidacy

We are delighted to celebrate a significant milestone in the academic journey of José Pilartes-Congo, who has officially advanced to candidacy in the Geospatial Computer Science program. This achievement marks the successful completion of rigorous coursework, comprehensive examinations, and the approval of his dissertation proposal, a testament to his dedication, intellectual rigor, and perseverance. José’s research lies at the intersection of geomatics engineering and GeoAI, and his work focuses on advancing spatial analytics for environmental and engineering applications. We look forward to the next phase of his doctoral journey.
MANTIS Students Showcase Research at IGARSS 2025 in Brisbane, Australia
MANTIS students Benjamin Ghansah and José Pilartes-Congo recently attended and presented their research at the IEEE International Geoscience and Remote Sensing Symposium (IGARSS) held in Brisbane, Australia, between August 3 and August 8. 2025.
Benjamin Ghansah, PhD student in Geospatial Computer Science, presented his research titled "Predicting Canopy Height of Crops Using ICESat-2 Photons, SkySat Images and ResUNet Deep Learning Model." His work demonstrated innovative integration of satellite and deep learning technologies for precision agriculture.
José Pilartes-Congo, also a PhD student in the Geospatial Computer Science program, presented his research titled “UAS Surveying of Wetlands: Comparing SfM and Lidar for 3D Reconstruction and DTM Generation," which compared the performance of specific UAS-SfM and UAS-Lidar sensors for wetland mapping. José also presented (on behalf of recent MANTIS graduate Sabin J. Pandey) a piece of research titled “Evaluation of SfM-MVS Apple Lidar Data for Coastal Monitoring."
The symposium provided valuable exposure and feedback, further enriching the students' academic trajectories.





Isabel A. Garcia-Williams Graduates!

MANTIS Ph.D. student Isabel A. Garcia-Williams has recently graduated from the Coastal and Marine System Science doctoral program at TAMUCC. During her time with MANTIS, Dr. Garcia-Williams was engaged in research involving mobile lidar deployment for monitoring coastal environments and surrounding habitats. Her work has led to several peer-reviewed journal/conference publications and conference presentations.
Dr. Garcia-Williams went on to pursue a career in research and development in California. We wish her the very best in her future endeavors.
Mohammad Sohail Presents Research at the 2025 CIG Community Workshop in Denver, Colorado
MANTIS and Computer Science PhD student Mohammad Sohail recently attended and presented his research at the 2025 Computational Infrastructure for Geodynamics (CIG) Community Workshop, held in Denver, Colorado, between August 3 and August 8, 2025. His research titled “Monitoring Flood-Induced Land Surface Deformation Using Sentinel SAR Interferometry and Optical Remote Sensing” explored the integration of advanced computer techniques and remote sensing to evaluate the impact of flood events on land surface characteristics.


Sabin J. Pandey Graduates
MANTIS master’s student Sabin J. Pandey has recently graduated from the Geospatial Systems Engineering program at TAMUCC. During his time with MANTIS, Sabin was engaged research involving close-range remote sensing techniques for monitoring campus facilities, particularly the use of UAS, lidar, and digital twins for as-built utility inventory. Sabin went on to work for an surveying firm in Florida as he continues to pursue a career as an RPLS. We wish him the very best in his future endeavors.
Sabin Pandey Defends Thesis
Congratulations to MANTIS and GSEN master student Sabin J. Pandey for successfully defending his dissertation, titled “Evaluating the Performance of Apple Pocket Lidar: Case Studies in Natural and Built Environments”.
As a GSEN student, Sabin worked under the advisement of Dr. Michael Starek. His research has focused on evaluating the capabilities and limitations of Apple pocket lidar (PL) sensor through case studies in both natural and built environments. Before his journey at MANTIS, Sabin received a B.E. in Geomatics Engineering from Purbanchal University in Nepal and worked as an academic for a brief period. Following graduation, he plans to relocate to Tampa, Florida, to join Element Engineering LLC and continue his career in the field of Geomatics. We wish him well in his future endeavors.
PRESENTATION ABSTRACT
Developments in light detection and ranging (lidar) systems have enabled integration of lidar sensors into consumer-grade Apple devices, opening new possibilities for low-cost, rapid, and accessible 3D data acquisition. This study evaluates the performance and practicality of the Apple pocket lidar (PL) sensor, using the iPad Pro with Pix4Dcatch and 3D Scanner apps, in both natural and built environments on the Texas A&M University–Corpus Christi (TAMUCC) campus. High-accuracy geomatics techniques, including real-time kinematic-global navigation satellite system (RTK-GNSS), terrestrial laser scanner (TLS), and total station (TS), were employed to acquire reference datasets. Uncrewed aircraft system (UAS)-based structure from motion (SfM) photogrammetry was utilized to explore data integration with PL-derived SfM/multi-view stereo (SfM-MVS) data. Lidar-only data from the 3D Scanner app produced smoother but less detailed surfaces, while photogrammetry-only scans offered richer texture but struggled in low-texture or homogenous areas, suggesting that a hybrid approach yields more complete data. Multiple scanning strategies (straight-line, loop, zigzag) were tested to examine data quality and algorithm behavior. Loop scans achieved the highest slope distance accuracy (2.7 cm root mean square error (RMSE)), with progressively decreasing errors in straight-line and loop scans, indicating the use of a simultaneous localization and mapping (SLAM)-like algorithm. Zigzag scans exhibited greater drift due to frequent directional changes.
In coastal applications, PL-derived digital elevation models (DEMs) of University Beach, a restored beach on the TAMUCC campus, achieved a vertical RMSE of approximately 10 cm relative to TLS reference DEMs, though targeting larger areas led to surface inconsistencies. For utility mapping, PL captured dense, high-resolution point clouds, with cloud-to-cloud (C2C) differences within 1.4 cm of TLS data. Data from Pix4Dcatch, outperformed raw PL scans from the 3D Scanner app in slope and width measurements. The integration of PL and UAS-SfM data within Pix4Dmatic provided improved geometric alignment compared to manual co-registration methods. Overall, the results demonstrate that PL is a practical tool for high-resolution, small to medium-scale localized 3D mapping, with strong potential in data fusion workflows and digital twin initiatives.










